CN EN
Home » AGVとAMR
BLOG
AGV(無人搬送車)とは、様々な産業において、多く使用されている自動運転車の一種で、人間が運転の操作を行わなくても、自動で走行できる搬送車です。英語では、「Automated guided vehicle」と表記されます。早くもインダストリー3.0の時代に、人々はAGVの探求と研究を始めました。 1953年、世界初のAGVが登場しました。
1972年、世界初の磁気誘導式AGVが開発されました。磁性体の磁気棒を床面に埋め込んだり、磁気テープを床面に貼ったりし、それを磁気センサーで読み取って誘導します。
2003年、画像認識方式AGVが開発されました。磁気棒や磁気テープの代わりに、床や天井に描かれた二次元コード(QRコード)やARマーカーといった記号を利用しました。AGVの下部に設置されたカメラを通じて、それを読み取り、自車の位置を把握しながら、高精度な位置制御もできます。
第一〜第三世代の誘導方式と異なり、誘導体の設置が不要でも自律走行が可能なため、正確にAGVではなく、AMR(自律走行搬送ロボット、英語でAutonomous Mobile Robot)と呼ばれるべきものです。カメラやレーザーセンサーなどの外部センサーとエンコーダーやジャイロスコープといった内部センサーを併用することにより、自己位置推定を行います。
自律走行、柔軟な実行、短期間での導入及び効率的な協業の四つの方面から、AMRとAGVを比較します。AMRの優位性がすぐわかるのでしょうか。
単に「A地点からB地点へものを運ぶ」車であるAGVに対して、AMRは「人と稼働場所を共有してものを運ぶ」ロボットということを覚えておきましょう。
AMRは、「人とロボットが補い合う関係」を構築することができるという大きなメリットがあります。この点から、AMRはただAGVの種類の一つではなく、AGVとは設計思想から異なる、全く新しい存在だと捉えてほしいと思っています。
現場へ導入する時、AGVの場合は、走行するための磁気棒や磁気テープ、二次元コード(QRコード)やARマーカーなどのガイドラインが必要です。そのため、導入の前の要件定義やレイアウト設計などが非常に重要になり、現場設置にも時間がかかってしまいます。
しかし、AMRの場合は、倉庫内を一周させ、現場全体をマッピングするなどで簡単に導入することができます。またAMRにはタブレットなどの操作端末が搭載されています。
AMRとAGVは現場への導入や走行方式の違いにより、移動する範囲にも違いが生じています。
AGVは誘導体により、設定された固定のルートしか走行しません。そのため、誘導体が設置されていないと、走行は不可能になります。また、設定された固定のルートの通路に障害物がある場合、AGVは停止し、走行もできなくなります。作業に支障なく順調に走行させるために、誘導体の設置及び障害物のない場所の確保が必要となります。
一方で、AMRは周囲の環境に合わせ、自動算出したルートを走行します。そのため、走行ルートの通路に人や障害物があっても、回避若しくは減速で対処することができます。誘導体の設置が不必要なことから、目的地の変更が容易で、状況に合わせ、変更も可能になります。
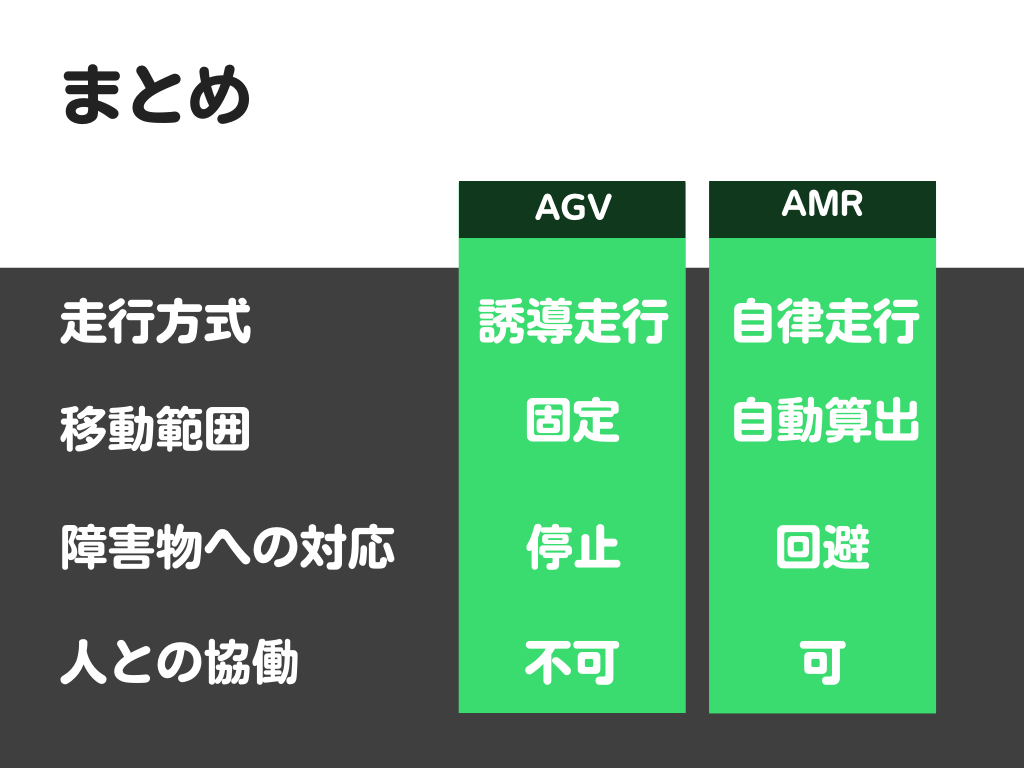
ここまで、ご説明してきたAMRとAGVの違いを、改めて次の図にまとめてみました。
sales.jp@forwardx.com
pr.jp@forwardx.com