

皆さんは、たぶんAMRの魅力を少しわかると思っています。たとえば、生産性の向上、エラー率の削減や設置の便利さなど、物流・倉庫業または製造業の人々にとって、言うまでもなく、絶対に大きなメリットだと言えます。ところが、AMRたちはどのようにそれを実現するのでしょうか。実際に、AMRは桃太郎のように、いくつかの「友達」がいます。
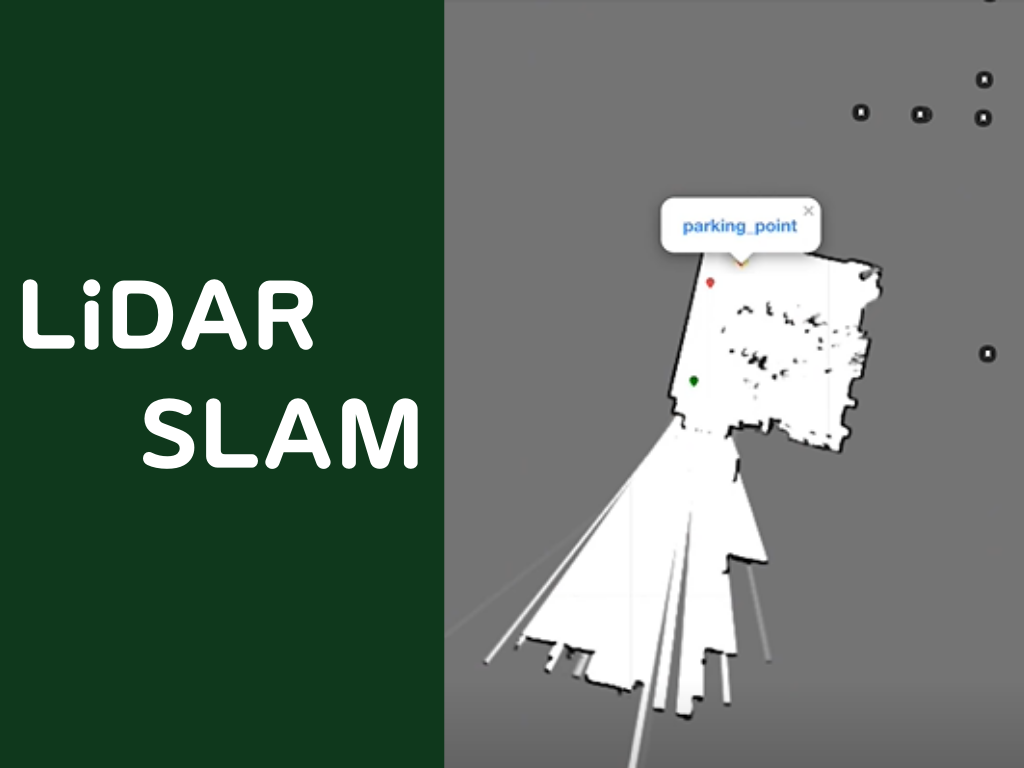
ライダースラム(LiDAR SLAM)
SLAMとは、英語の「Simultaneous Localization and Mapping」の頭文字をとり、SLAM(スラム)と呼び、自己位置推定と環境地図作成を様々なセンサーを組み合わせ、実現する仕組みだと言います。なぜセンサーを組み合わせるのかというと、センサはそれぞれの長所と短所があるため、複数のセンサーを用い、お互いに短所を補い合う必要があります。各センサーの比較は次の図にまとめてみましたが、ご覧ください。
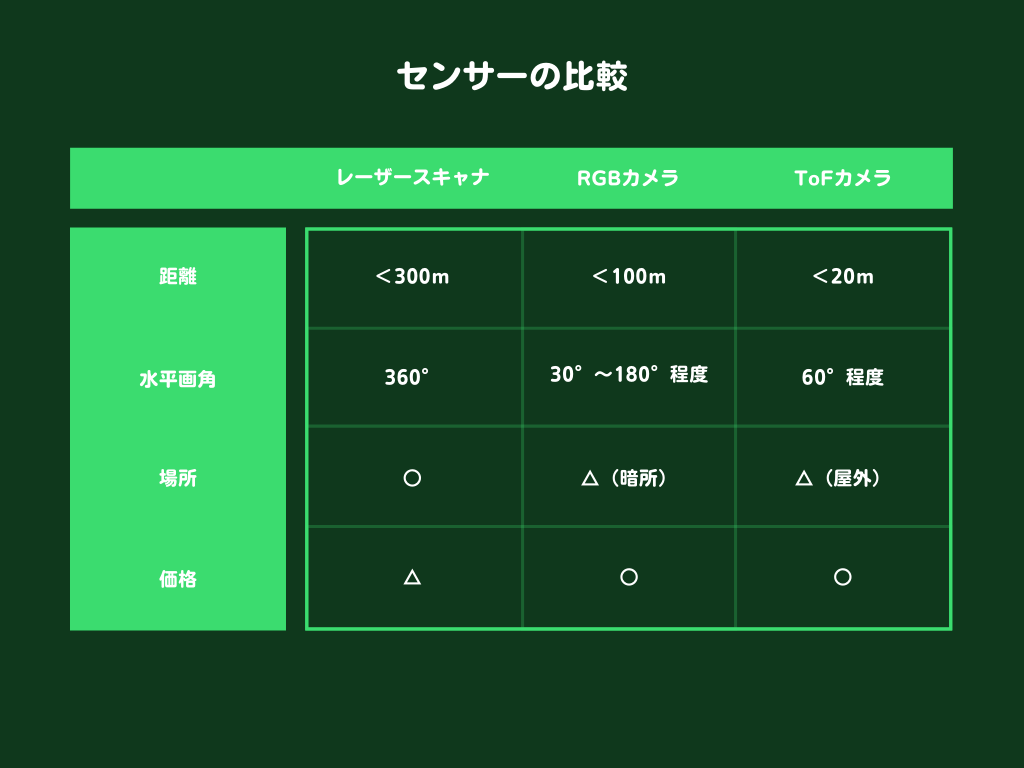
LiDAR SLAMは、LiDAR(レーザースキャナ)から取得したデータにより、実現するSLAM技術です。LiDARの出力値は2D (X、Y座標)や3D (X、Y、Z座標)の点群データとなっており、非常に高い精度で物体までの距離を計測することができます。また、LiDARはカメラと比べて、遠距離での測距精度に優れ、より高精度なマップを作成することができます。ただし、一般的に周辺に検知対象となる障害物が少ない環境では、点群データの取得が難しくなり、データ処理の負荷も大きいといった課題もあります。
コンピュータビジョン (Computer Vision)
コンピュータビジョンの目的は、コンピュータに人間の目に相当する機能を持たせること、つまり、「コンピュータによる視覚」を実現することです。具体的には、静止画若しくは動画のデータをもとに、コンピュータのソフトウェアが人間の視覚に近い、若しくはそれ以上の機能を持つことを目標としています。
カメラなどで取り込んだデジタル形式の画像や映像を処理し、写っている物やその種類の特定、個体の識別、距離や位置、動きの検出や追跡などを行います。人間が視覚で捉えたシーンを脳で認識する過程の一部をコンピュータで再現する手法とも言えます。
画像から情報を抽出する技術は応用範囲が幅広く、機械の自動制御や自動車の自動運転などの事例がよく知られています。近年では、認識メカニズムに人工知能の技術を応用し、ニューラルネットワークを始めとする機械学習により、高度な認識処理を可能にする研究も進んでいます。
ForwardXのAMRは、ライダースラムの上に、コンピュータビジョンも利用していします。コンピュータビジョン及び自律走行の技術により、地図作成の精度を向上させます。 同時に、ナビゲーションや障害物回避の面ではAMRは、自由にナビゲートして目的の場所へ柔軟に移動し、障害物をリアルタイムに検知して自動的に回避することができます。

「エキスパートアイ」システム
頭上のトップビューカメラを利用します。コンピュータビジョンで複数の貨物位置の状態を識別するのを通じて、ラックの位置と状態を可視化し、情報データをシステムとAMRにリアルタイムでフィードバックします。このように、完全に無人化された情報識別のフィードバックと送信を通じて、「エキスパートアイ」システムは、人間の代わりに、PDAやコンピューターといった端末で操作します。 通常のセンサーと比べて、導入がより容易で、1台のカメラで複数の貨物の状態変化を監視することができます。
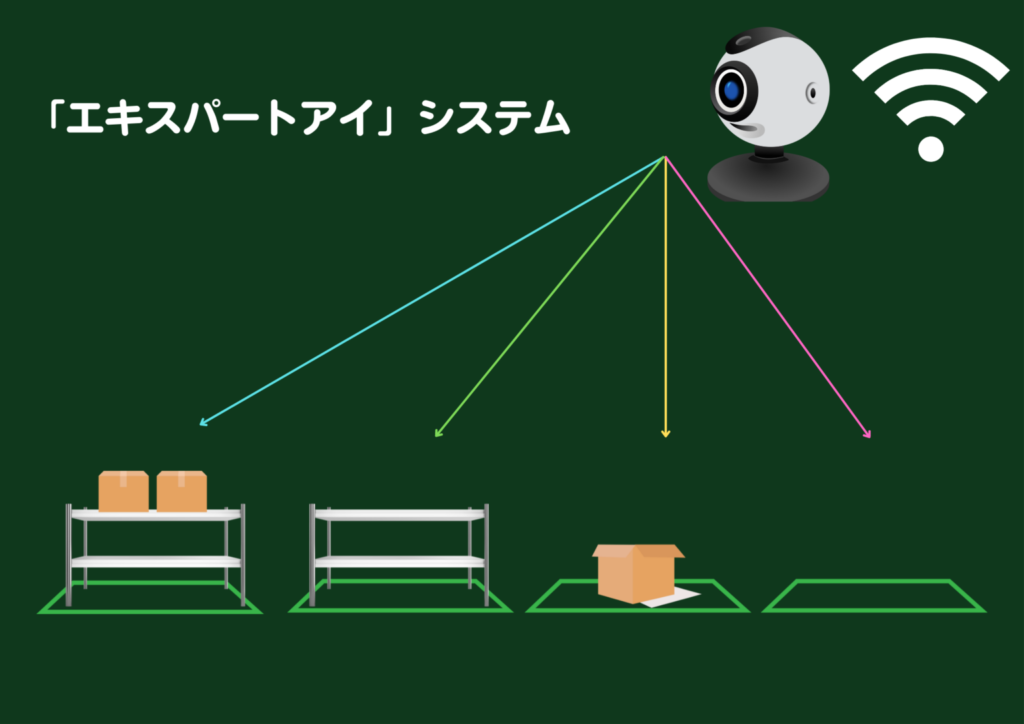
通常のセンサーが「空」と「占有」の二つの状態しか識別できないのに対して、「エキスパートアイ」システムは場所の「空」と「占有」、ラックの「空」と「貨物がある」の四つの状態を同時に監視することができます。対象となる場所が占有されている場合、「エキスパートアイ」システムはそのエリアを黄色で表示します。対象となる場所に障害物がなく、ラックがない場合、そのエリアをピンク色で表示します。対象となるラックに貨物がない場合、そのエリアを緑で表示します。対象となるラックに貨物がある場合、そのエリアを青く表示します。システムとAMRに情報をフィードバックするのを通じて、AMRは自律的な判断を実現して、インテリジェントに経路を計画します。最終的に、無人化された作業を実現します。